
Analysis of factors related to surgical difficulty and establishment of prediction model for robot-assisted laparoscopic pyeloplasty in children
-
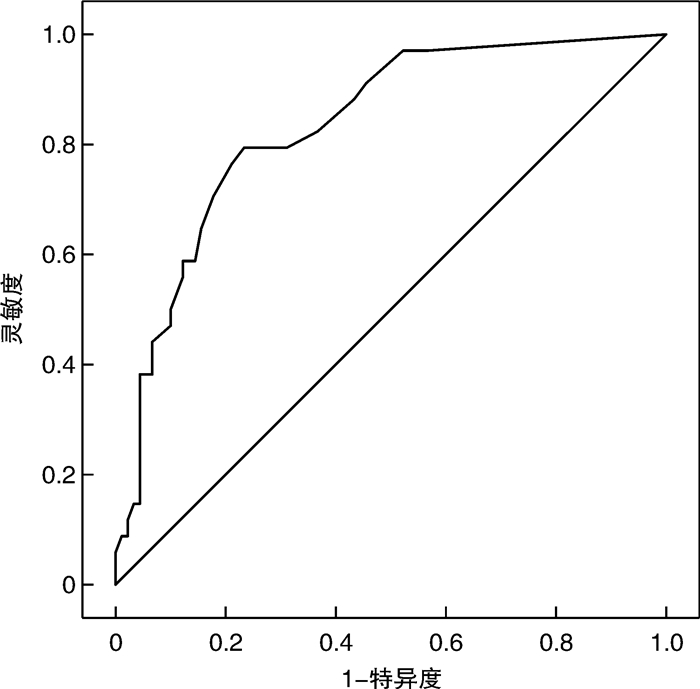
摘要: 目的 对增加机器人辅助腹腔镜儿童肾盂成形术手术难度相关因素进行分析,并探讨相关因素对增加手术难度的预测价值。方法 回顾性分析2020年9月—2021年9月于我院住院行机器人辅助腹腔镜肾盂成形术治疗患儿的临床资料,依据手术时间及出血量分正常组及困难组并进行比较,对可能引起手术困难的相关因素进行多因素分析,并通过二元logistic回归构建预测手术难度的模型。结果 本研究共纳入124例初次行机器人辅助腹腔镜肾盂成形术治疗的单侧肾积水患儿,单因素分析显示患儿年龄、术前复发性尿路感染、小肾盂、肾轴旋转不良、腔静脉后输尿管、异位血管与手术难度相关(P < 0.05)。Logistic回归分析发现,婴幼儿手术(OR=3.202,95%CI:1.148~8.935,P=0.026)、术前复发性尿路感染(OR=3.568,95%CI:1.187~10.723,P=0.023)、小肾盂(OR=3.836,95%CI:1.334~11.028,P=0.013)、肾轴旋转不良(OR=3.074,95%CI:1.074~8.798,P=0.036)、腔静脉后输尿管(OR=3.117,95%CI:1.013~9.591,P=0.047)是影响手术难度的相关因素。通过模型公式Logit(P)=-2.744+1.164×婴幼儿手术+1.272×术前复发性尿路感染+1.344×小肾盂+1.123×肾轴旋转不良+1.137×腔静脉后输尿管,可以术前预测手术难度,其AUC、灵敏度、特异度、约登指数、临界值分别为0.865、83.4%、84.7%、0.701、0.268。结论 婴幼儿手术、术前存在复发性尿路感染、小肾盂、肾轴旋转不良及腔静脉后输尿管,可以增加患儿机器人辅助腹腔镜肾盂成形术难度。本预测模型可以为准备或初步开展机器人手术的泌尿外科医生提供参考依据,并可以术前预判手术难度,便于该技术更安全地推广。
-
关键词:
- 机器人辅助腹腔镜肾盂成形术 /
- 肾积水 /
- 儿童 /
- 难度预测
Abstract: Objective To analyze the factors related to increasing the difficulty of robot-assisted laparoscopic pyeloplasty in children, and to explore the predictive value of related factors for increasing the difficulty of the operation.Methods The clinical data of children who underwent robot-assisted laparoscopic pyeloplasty in our hospital from September 2020 to September 2021 were retrospectively analyzed. According to the operation time and blood loss, they were divided into normal group and difficult group and compared. Binary logistic regression was used to construct a model to predict surgical difficulty.Results A total of 124 children with unilateral hydronephrosis who underwent robot-assisted laparoscopic pyeloplasty for the first time were enrolled in this study. Univariate analysis showed that age, preoperative recurrent urinary tract infection, small renal pelvis, renal axis malrotation, retrocaval ureter, and ectopic vessels were associated with surgical difficulty (P < 0.05). Logistic regression analysis showed that infant surgery (OR=3.202, 95%CI: 1.148-8.935, P=0.026) and preoperative recurrent urinary tract infection (OR=3.568, 95%CI: 1.187-10.723, P=0.023), small renal pelvis (OR=3.836, 95%CI: 1.334-11.028, P=0.013), renal axis malrotation (OR=3.074, 95%CI: 1.074-8.798, P=0.036) and retrocaval ureter (OR=3.117, 95%CI: 1.013-9.591, P=0.047) were related factors affecting the difficulty of operation. According to the model formula Logit(P)=-2.744+1.164×infant surgery+1.272× preoperative recurrent urinary tract infection +1.344×small renal pelvis+1.123×renal axis malrotation+1.137×retrocaval ureter, the difficulty of operation could be predicted before operation. The AUC, sensitivity, specificity, Youden index and critical value were 0.865, 83.4%, 84.7%, 0.701, 0.268, respectively.Conclusion Infant surgery, preoperative recurrent urinary tract infection, small renal pelvis, renal axis malrotation and retrocaval ureter may increase the difficulty of robot-assisted laparoscopic pyeloplasty. This prediction model can provide reference for urological surgeons who are preparing or initially carrying out robotic surgery, and predict the difficulty of surgery so as to promote this technology safely. -

-
表 1 单侧肾积水患儿术前病情参数对手术难度影响的单因素分析
例(%),M(P25,P75) 组别 婴幼儿手术 术前RUTI 小肾盂 RM RU EVC SRF 术前造瘘 正常组(90例) 17(18.9) 15(16.7) 12(13.3) 15(16.7) 9(10.0) 14(15.6) 32%(28%,38%) 17(18.9) 困难组(34例) 15(44.1) 16(47.1) 13(38.2) 13(38.2) 11(32.4) 11(32.4) 30%(26%,35%) 5(14.7) χ2/ U值 8.203 12.157 11.545 6.567 9.889 4.326 0.592 0.296 P值 0.004 < 0.001 0.001 0.010 0.002 0.038 0.219 0.586  下载: 导出CSV
下载: 导出CSV
表 2 单侧肾积水患儿术前病情参数对手术难度影响的多因素分析
变量 B值 标准误 χ2值 P值 OR值 OR值95% CI 下限 上限 婴幼儿手术 1.164 0.524 4.942 0.026 3.202 1.148 8.935 术前RUTI 1.272 0.561 5.134 0.023 3.568 1.187 10.723 小肾盂 1.344 0.539 6.225 0.013 3.836 1.334 11.028 RM 1.123 0.537 4.381 0.036 3.074 1.074 8.798 RU 1.137 0.573 3.929 0.047 3.117 1.013 9.591 EVC 0.590 0.611 0.933 0.334 1.805 0.545 5.980 常量 -2.744 0.466 34.688 < 0.001 0.064
下载: 导出CSV
-
[1] Esposito C, Masieri L, Castagnetti M, et al. Robot-assisted vs laparoscopic pyeloplasty in children with uretero-pelvic junction obstruction(UPJO): technical considerations and results[J]. J Pediatr Urol, 2019, 15(6): 667. e1-667. e8. doi: 10.1016/j.jpurol.2019.09.018
[2] Naitoh Y, Ajiki J, Yamada Y, et al. Comparison of the initial operative experience of a single surgeon carrying out robot-assisted laparoscopic pyeloplasty, laparoendoscopic single-site pyeloplasty and conventional laparoscopic pyeloplasty[J]. Int J Urol, 2020, 27(2): 186-187. doi: 10.1111/iju.14150
[3] Chandrasekharam V, Babu R. A systematic review and metaanalysis of open, conventional laparoscopic and robot-assisted laparoscopic techniques for re-do pyeloplasty for recurrent uretero pelvic junction obstruction in children[J]. J Pediatr Urol, 2022, 18(5): 642-649. doi: 10.1016/j.jpurol.2022.08.025
[4] 中华医学会泌尿外科学分会小儿泌尿外科学组. 儿童机器人辅助腹腔镜肾盂输尿管连接处梗阻手术操作指南(2020版)[J]. 中华泌尿外科杂志, 2020, 41(7): 486-491. doi: 10.3760/cma.j.cn112330-20200629-00012
[5] Blanc T, Pio L, Clermidi P, et al. Robotic-assisted laparoscopic management of renal tumors in children: Preliminary results[J]. Pediatr Blood Cancer, 2019, 66 Suppl 3: e27867.
[6] Masieri L, Sforza S, Grosso AA, et al. Robot-assisted laparoscopic pyeloplasty in children: a systematic review[J]. Minerva Urol Nefrol, 2020, 72(6): 673-690.
[7] 汤绍涛. 机器人手术在小儿外科中的发展现状及展望[J]. 机器人外科学杂志(中英文), 2021, 2(4): 241-247. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRW202104002.htm
[8] 曹华林, 周辉霞, 马立飞, 等. 婴幼儿隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术[J]. 微创泌尿外科杂志, 2017, 6(2): 74-77. https://www.cnki.com.cn/Article/CJFDTOTAL-WCMN201702004.htm
[9] 张潍平, 张晔. 微创在小儿泌尿外科中的应用[J]. 中华小儿外科杂志, 2017, 38(6): 401-402. doi: 10.3760/cma.j.issn.0253-3006.2017.06.001
[10] 刘德鸿, 周辉霞, 马立飞, 等. 机器人辅助腹腔镜肾盂成形术治疗小婴儿肾积水的初步经验[J]. 中华泌尿外科杂志, 2019, 40(1): 2-7. doi: 10.3760/cma.j.issn.1000-6702.2019.01.001
[11] 吕逸清, 谢华, 黄轶晨, 等. 机器人辅助腹腔镜下儿童肾盂成形术的初步探讨[J]. 中华泌尿外科杂志, 2015, 36(10): 721-725. doi: 10.3760/cma.j.issn.1000-6702.2015.10.001
[12] 陶天, 周辉霞, 李品, 等. 机器人辅助腹腔镜同期处理小儿双侧肾盂输尿管连接部梗阻的初步经验[J]. 中华小儿外科杂志, 2020, 41(3): 193-196.
[13] 高建, 张书峰, 王晓晖, 等. 机器人辅助腹腔镜肾盂成形术在儿童肾盂输尿管连接部梗阻中的应用[J]. 中国微创外科杂志, 2022, 22(6): 454-458. https://www.cnki.com.cn/Article/CJFDTOTAL-ZWWK202206002.htm
[14] Thiel DD. Navigating the difficult robotic assisted pyeloplasty[J]. ISRN Urol, 2012, 2012: 291235.
[15] 郭松, 杨明杰, 谭军. 手术机器人面临的一大挑战——力触觉反馈[J]. 中国生物医学工程学报, 2013, 32(4): 499-503. https://www.cnki.com.cn/Article/CJFDTOTAL-ZSWY201304018.htm
[16] 陶畅, 唐达星, 徐哲明, 等. 机器人辅助腹腔镜肾盂成形术在小儿小肾盂输尿管肾盂连接部梗阻中的应用[J]. 中华小儿外科杂志, 2020, 41(3): 205-209. https://www.cnki.com.cn/Article/CJFDTOTAL-ZWWK202206002.htm
[17] 王志向, 陈焱, 程学军, 等. 腹腔镜肾盂成形术治疗UPJO合并肾旋转不良及异位血管1例[J]. 空军医学杂志, 2022, 38(1): 92-93. https://www.cnki.com.cn/Article/CJFDTOTAL-ZJZY202201026.htm
[18] 颜海标, 黄伟华, 莫曾南, 等. 肾旋转不良的临床解剖特点及诊疗对策探讨[J]. 局解手术学杂志, 2010, 19(6): 506-507. https://www.cnki.com.cn/Article/CJFDTOTAL-JJXZ201006025.htm
[19] 赵海岳, 叶雄俊, 陈伟男, 等. 腹腔镜肾盂成型术中异位血管的处理方法[J]. 北京大学学报(医学版), 2019, 51(4): 660-664. https://www.cnki.com.cn/Article/CJFDTOTAL-BYDB201904012.htm
[20] Seo IY, Oh TH, Jeon SH. Transperitoneal laparoscopic ureteroureterostomy with excision of the compressed ureter for retrocaval ureter and review of literature[J]. Investig Clin Urol, 2019, 60(2): 108-113.
[21] Chow AK, Rosenberg BJ, Capoccia EM, et al. Risk Factors and Management Options for the Adult Failed Ureteropelvic Junction Obstruction Repair in the Era of Minimally Invasive and Robotic Approaches: A Comprehensive Literature Review[J]. J Endourol, 2020, 34(11): 1112-1119.
-
图(1)
表(2)
计量
- 文章访问数: 652
- PDF下载数: 248
- 施引文献: 0